
I am a Ph.D. Student in Intelligent Systems & Robotics at UWF and Research Assistant at IHMC advised by Dr. Robert Griffin. I work at the intersection of AI, robotic perception & autonomy, with a focus on applying foundation models to humanoids for manipulation & navigation in real-world environments. My research areas for humanoids include:
- Foundation Models for Object Detection & Pose Estimation
- Physics Engine, Diff. Sim, Rendering of Objects & Robots
- Learning driven Dexterous Object Manipulation
- Hierarchical Task and Motion Planning for Manipulation
- SLAM & Scene Graph for Manipulation & Navigation
At IHMC, I work on advancing both model-based and model-free approaches for humanoid manipulation using Vision-Language-Action (VLA) models, and developing scene knowledge graphs to enable active navigation for autonomous interactive manipulation, indoor building exploration, and outdoor terrestrial as well as space exploration missions.
Before joining IHMC, I worked on the DARPA SubT Challenge with NASA JPL, developing SLAM, object detection, and multi-robot exploration systems for legged, wheeled & aerial robots in underground environments. During my PhD, I interned at NASA JPL, contributing to the DARPA RACER Challenge on augmenting perception sensors for faster traversability estimation and long-horizon planning in an off-road setting with high-speed autonomous rovers for the US Army.
Email: achatterjee [at] ihmc [dot] org
Office: 40S Alcaniz Street, IHMC Robotics Lab, Pensacola, FL 32502, US.
Sponsors

Featured Research
Duncan Calvert, Luigi Penco, Dexton Anderson, Tomasz Bialek, Arghya Chatterjee, Bhavyansh Mishra, Geoffrey Clark, Sylvain Bertrand, Robert Griffin
RAS 2025
Video •
Paper •
Code
Benjamin Morrell, Kyohei Otsu, Ali Agha, David Fan, Sung Kim, Muhammad F. Ginting, Xianmei Lei, Jeffrey Edlund, Seyed Fakoorian, Amanda Bouman, Arghya Chatterjee et al
TFR 2024
Website •
Video •
Paper •
Code
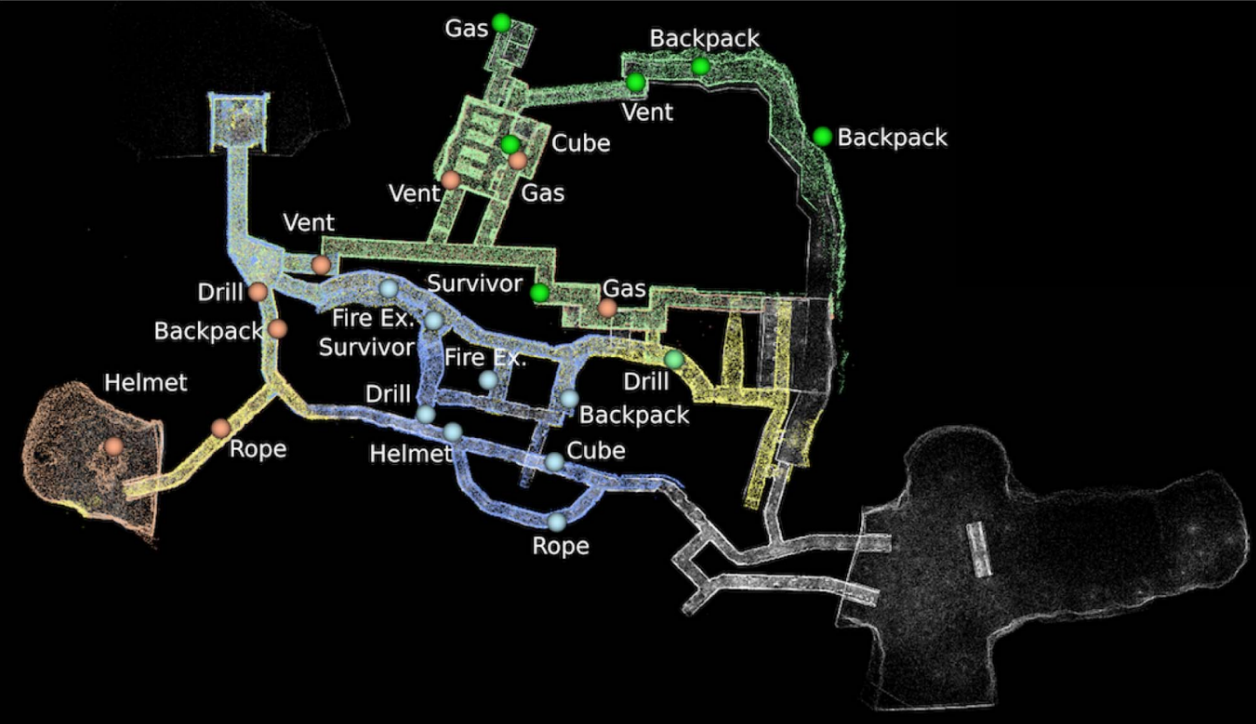 Present and Future of SLAM in Extreme Environments: The DARPA SubT Challenge
Present and Future of SLAM in Extreme Environments: The DARPA SubT Challenge
Kamak Ebadi, Lukas Bernreiter, Harel Biggie, Gavin Catt, Yun Chang, Arghya Chatterjee et al
TRO 2023
Video •
Paper
Yun Chang, Kamak Ebadi, Christopher E Denniston, Muhammad Fadhil Ginting, Antoni Rosinol, Andrzej Reinke, Matteo Palieri, Jingnan Shi, Arghya Chatterjee, Benjamin Morrell, Ali-akbar Agha-mohammadi, Luca Carlone
ICRA 2022
Video •
Paper •
Code
Matteo Palieri, Benjamin Morrell, Abhishek Thakur, Kamak Ebadi, Jeremy Nash, Arghya Chatterjee, Christoforos Kanellakis, Luca Carlone, Cataldo Guaragnella, Ali-akbar Agha Mohammadi
ICRA 2021
Webpage •
Video •
Paper •
Code
Arghya Chatterjee, Musanna Galib, M.A. Rashid Sarkar
ICPCSI 2017
Video •
Paper •
Code
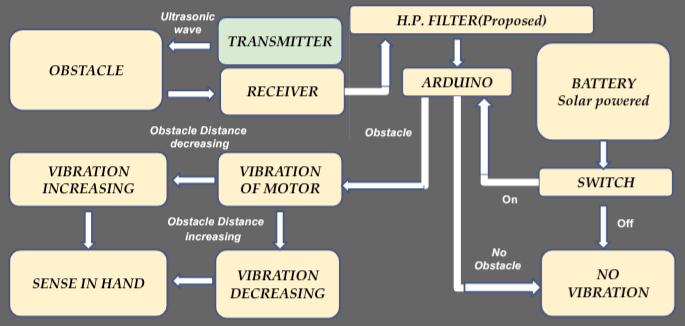 Obstacle Detector For Blind People with Low Cost
Obstacle Detector For Blind People with Low Cost
Arghya Chatterjee, Shantanu Dutta Nitun, Porag Sarker, A. B. M. Alim Al Islam
NSysS 2017
Poster •
Code
Featured Project
Arghya Chatterjee, IHMC & BoardWalk Robotics Team
IHMC & Boardwalk Robotics 2024
Website •
Video
Arghya Chatterjee & Shehryar Khattak
NASA JPL & DARPA 2023
Website •
Video
Arghya Chatterjee & Lotus Robotics Team
Lotus Robotics 2022
Video •
Code
Arghya Chatterjee & STEM-X 365 Team
JAXA & STEMX-365 2021
Website •
Video •
Code
Arghya Chatterjee & BUET Mars Rover Team
Team Interplanetar 2020
Website •
Video •
Code1 •
Code2
Grants & Funding
-
Handler: An End-to-End Tool for Semantic-based Manipulation using ATs using NASA Valkyrie Humanoid for Space Application
- Funding Agency, Topic, Affiliation & Year: NASA SBIR, Sensing & Perception Software for Autonomous Manipulation & Utilization Tasks in Space, IHMC & BW, 2023